Factory digital twin

Factory digital twin
Digital Twin
Simulation
LCA
Optimisation
Project overview: Before you spend millions on industrial automation, you simulate it. For this project, I built a comprehensive digital twin for a robotic lithium-ion battery sorting facility. The goal was to create a virtual environment to test layouts, identify conveyor bottlenecks, and optimize energy consumption long before any physical steel is cut.
What I built:
- A dynamic, real-time simulation environment in Quanser that accurately mirrored the physical behavior and kinematics of the sorting robot arms.
- Single-arm and dual-arm factory layouts, iterating on conveyor routing to maximize throughput and minimize wasted operator motion.
- A validation pipeline that benchmarked my simulation data (cycle times, energy draw) against physical hardware to correct for idealized motor physics.
- A quantitative Life Cycle Assessment (LCA) model measuring the environmental impact of prioritizing recycled battery materials over virgin mining.
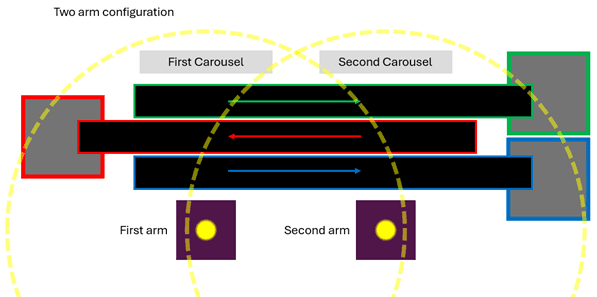
2 arm digital twin schematic
Technical insights:
- Spotting the gap: When comparing the twin's power data to the real robot, the simulation consistently underestimated energy usage because it lacked friction and real-world inefficiency models. Correcting this was vital for accurate OPEX forecasting.
- Staffing logistics: Using the simulation, I identified the optimal technician-to-robot ratio, proving that adding more robots eventually creates a human bottleneck without layout changes.
- The sustainability case: The LCA proved mathematically that optimizing this robotic recycling pipeline could reduce the global warming potential of new battery packs by over 20% and cut resource depletion impacts by 73%.
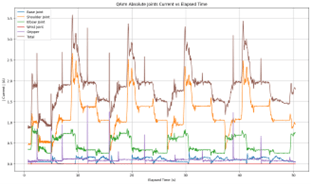
Arm power consumption data
Ultimately, this project demonstrated how building a rigorous digital twin enables completely data-driven capital investment decisions, proving that closed-loop battery recycling is both economically and environmentally viable when scaled correctly.